 | Object Recognition with Uncertain Geometry and Uncertain Part Detection In Computer Vision and Image Understanding 2005. [bibtex] [pdf] [url] |
Abstract
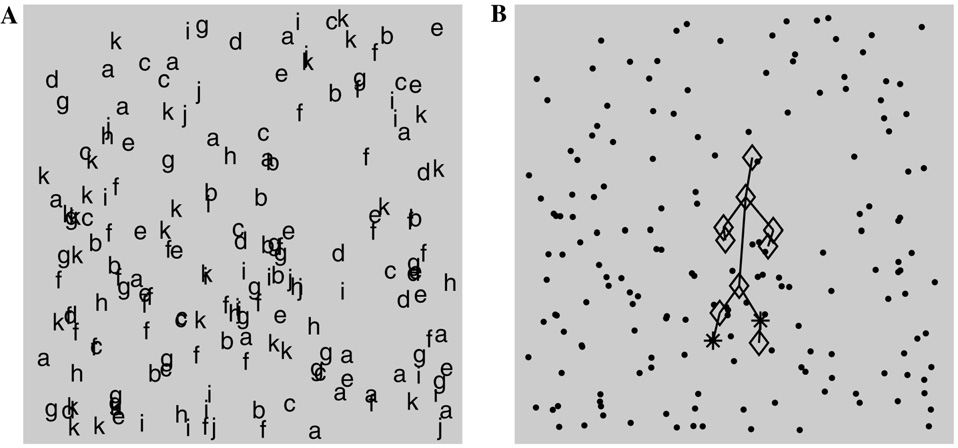
This paper presents a method for object recognition once parts have been detected. The recognition task is formulated as a graph problem searching for the characteristic geographical arrangements of (possibly missing) parts. The objective function is Bayesian maximum a posteriori estimation, integrating the image likelihood as a posteriori probability of the part detectors. The variability in the arrangement of object parts is captured by a Gaussian distribution after translation normalization. By employing two special properties of a Gaussian distribution, we are able to deal with missing parts situation where the chosen origin is not detected. We use an A* algorithm to find the optimal solution for the graph search problem. Experiments are performed on both synthetic and real data to demonstrate good results and fast performance of the recognition. Bibtex Entry
@Article{PhamCVIU2005,
author = "Pham, T. V. and Smeulders, A. W. M.",
title = "Object Recognition with Uncertain Geometry and Uncertain Part Detection",
journal = "Computer Vision and Image Understanding",
number = "2",
volume = "99",
pages = "241--258",
year = "2005",
url = "https://ivi.fnwi.uva.nl/isis/publications/2005/PhamCVIU2005",
pdf = "https://ivi.fnwi.uva.nl/isis/publications/2005/PhamCVIU2005/PhamCVIU2005.pdf",
has_image = 1
}