 | Depth Estimation Via Stage Classification In IEEE 3DTV-Conference 2008. [bibtex] [pdf] [url] |
Abstract
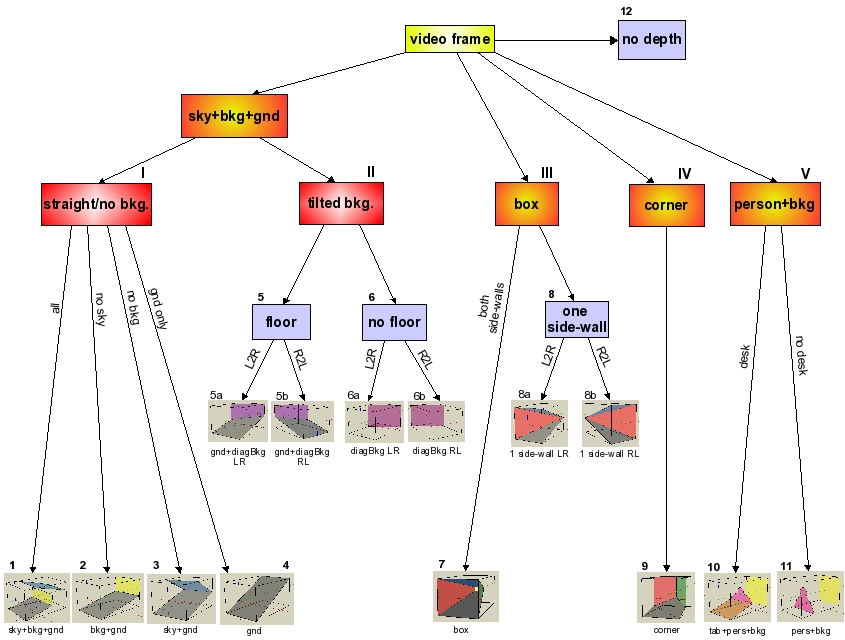
We identify scene categorization as the first step towards efficient and robust depth estimation from single images. Categorizing the scene into one of the geometric classes greatly reduces the possibilities in subsequent phases. To that end, we introduce 15 typical 3D scene geometries, called stages, each having a unique depth profile and roughly corresponding to a large majority of all images. In this work, we do not attempt to derive a precise depth map, but only to decide on the appropriate stage. The subsequent phase of parameter estimation would result in a more detailed background depth profile.Bibtex Entry
@InProceedings{NedovicI32008,
author = "Nedovic, V. and Smeulders, A. W. M. and Redert, A. and Geusebroek, J. M.",
title = "Depth Estimation Via Stage Classification",
booktitle = "IEEE 3DTV-Conference",
pages = "77--80",
year = "2008",
url = "https://ivi.fnwi.uva.nl/isis/publications/2008/NedovicI32008",
pdf = "https://ivi.fnwi.uva.nl/isis/publications/2008/NedovicI32008/NedovicI32008.pdf",
has_image = 1
}