 | Codemaps Segment, Classify and Search Objects Locally In IEEE International Conference on Computer Vision 2013. [bibtex] [pdf] [url] |
Abstract
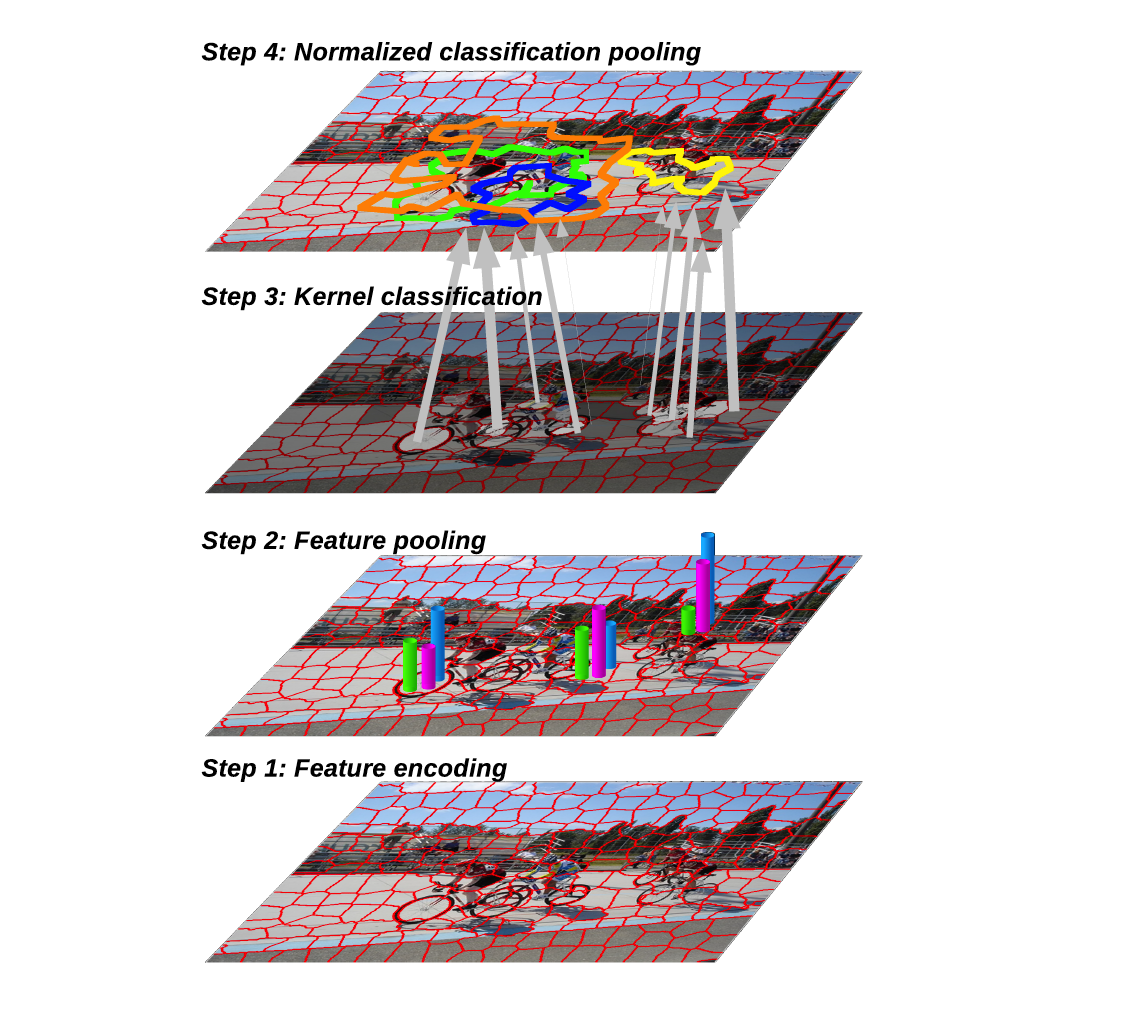
In this paper we aim for segmentation and classification of objects. We propose codemaps that are a joint formulation of the classification score and the local neighborhood it belongs to in the image. We obtain the codemap by reordering the encoding, pooling and classification steps over lattice elements. Other than existing linear decompositions who emphasize only the efficiency benefits for localized search, we make three novel contributions. As a preliminary, we provide a theoretical generalization of the sufficient mathematical conditions under which image encodings and classification becomes locally decomposable. As first novelty we introduce l2 normalization for arbitrarily shaped image regions, which is fast enough for semantic segmentation using our Fisher codemaps. Second, using the same lattice across images, we propose kernel pooling which embeds nonlinearities into codemaps for object classification by explicit or approximate feature mappings. Results demonstrate that ℓ2 normalized Fisher codemaps improve the state-of-the-art in semantic segmentation for PASCAL VOC. For object classification the addition of nonlinearities brings us on par with the state-of-the-art, but is 3x faster. Because of the codemaps’ inherent efficiency, we can reach significant speed-ups for localized search as well. We exploit the efficiency gain for our third novelty: object segment retrieval using a single query image only.Bibtex Entry
@InProceedings{LiICCV2013,
author = "Li, Z. and Gavves, E. and van de Sande, K. E. A. and Snoek, C. G. M.
and Smeulders, A. W. M.",
title = "Codemaps Segment, Classify and Search Objects Locally",
booktitle = "IEEE International Conference on Computer Vision",
year = "2013",
url = "https://ivi.fnwi.uva.nl/isis/publications/2013/LiICCV2013",
pdf = "https://ivi.fnwi.uva.nl/isis/publications/2013/LiICCV2013/LiICCV2013.pdf",
has_image = 1
}